近日,南京农业大学智慧农业学院舒磊教授团队围绕菊花移动平台实时计数开展的研究论文“VTC-TrackBot: A Robust Spatiotemporal Framework for Real-Time Chrysanthemum Counting on Mobile Edge Devices”被《IEEE Transactions on AgriFood Electronics》录用,论文DOI为10.1109/TAFE.2026.3688647。该研究面向复杂田间环境下菊花花朵实时计数需求,提出了一种集成目标检测、多目标跟踪、双线时空计数和边缘端部署的移动机器人计数框架,为菊花花期监测、产量估计和智能化田间管理提供了新的技术方案。论文第一作者为智慧农业学院博士研究生臧思扬,通讯作者为智慧农业学院舒磊教授。该研究得到农业农村部园林植物种质创新与利用重点实验室基金(No. KFL202402)资助。
在计数策略方面,团队设计了双线时空融合计数方法 DSIC,通过设置入口线和出口线,利用移动平台行进过程中形成的前后视角差异,对遮挡区域中的断裂轨迹进行关联修复,并通过时空约束过滤由平台振动引起的异常轨迹,从而降低重复计数和漏计问题。
为验证方法的实际应用能力,团队构建了面向茶菊动态计数任务的数据集,并将完整系统部署到搭载NVIDIA Jetson Xavier NX的履带式地面移动平台上开展田间实验。实验结果表明,YOLO-VTC 检测模型在复杂茶菊图像上的mAP@0.5达到86.6%,模型大小仅约6.58 MB;系统在移动边缘设备上实现了23 FPS的实时运行速度,计数结果与人工标注结果之间的决定系数R²达到0.983,平均相对误差MRE为4.14%。与传统单线计数、区域计数以及常用多目标跟踪方法相比,该方法在密集遮挡和平台振动条件下表现出更高的计数精度和稳定性。
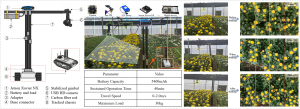
图1. 三种计数策略与不同多目标跟踪器结合后的定量比较
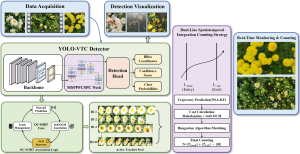
图2. 所提出的 VTC-TrackBot 框架系统架构。该流程包括四个关键阶段:1)通过定制履带式移动机器人进行数据采集;2)利用集成 MSPPFCSPC 和 BoT3 模块的 YOLO-VTC 实现高精度检测;3)基于改进 OC-SORT 进行鲁棒多目标跟踪,其中融合了 NSA Kalman 滤波器和 Soft-OCM 策略;4)采用 DSIC 策略实现实时、无盲区的可视化计数